Trên mặt phẳng Oxy cho điểm \(A\left(-2;1\right)\). Gọi B là điểm đối xứng với điểm A qua gốc tọa độ O. Tìm tọa độ của điểm C có tung độ bằng 2 sao cho tam giác ABC vuông ở C ?

Những câu hỏi liên quan

SGK Chân trời sáng tạo trang 38-40

26 tháng 9 2023 lúc 23:44
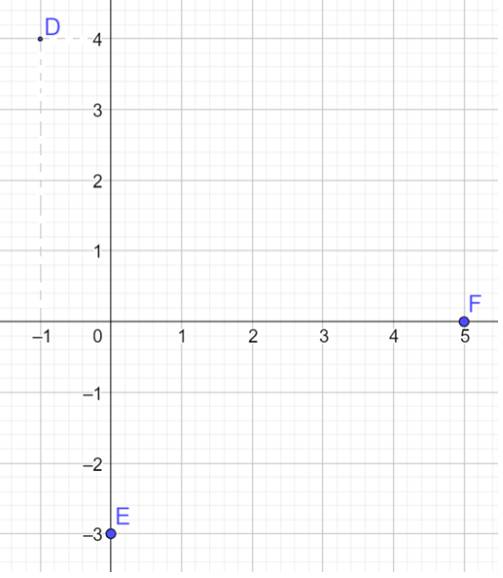
Trong mặt phẳng Oxy, cho ba điểm \(D\left( { - 1;4} \right),E\left( {0; - 3} \right),F\left( {5;0} \right)\)
a) Vẽ các điểm D, E, F trên mặt phẳng Oxy
b) Tìm tọa độ của các vectơ \(\overrightarrow {OD} ,\overrightarrow {OE} ,\overrightarrow {OF} \).
c) Vẽ và tìm tọa độ hai vectơ đơn vị và \(\overrightarrow j \)lần lượt trên hai trục tọa độ Ox và Oy



a)
b) Vì tọa độ vectơ \(\overrightarrow {OM} \) chính là tọa độ của điểm M (với mọi M) nên ta có:
\(\overrightarrow {OD} = \left( { - 1;4} \right),\overrightarrow {OE} = \left( {0; - 3} \right),\overrightarrow {OF} = \left( {5;0} \right)\)
c)
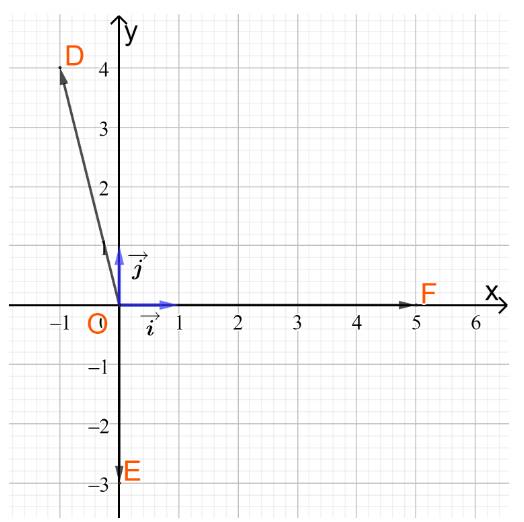
Từ hình vẽ ta có tọa độ của hai vectơ và \(\overrightarrow j \)là
và \(\overrightarrow j = (0;1)\)
Đúng 0
Bình luận (0)
Trên mặt phẳng tọa độ Oxy cho 4 điểm \(A\left(7;-3\right);B\left(8;4\right);C\left(1;5\right);D\left(0;-2\right)\). Chứng minh rằng tứ giác ABCD là hình vuông ?

Ta có: = (1; 7);
= (1; 7)
=
=> ABCD là hình bình hành (1)
ta lại có : AB2 = 50 => AB = 5 √2
AD2 = 50 => AD = 5 √2
AB = AD, kết hợp với (1) => ABCD là hình thoi (2)
Mặt khác = (1; 7);
= (-7; 1)
1.7 + (-7).1 = 0 => ⊥
(3)
Kết hợp (2) và (3) suy ra ABCD là hình vuông
Đúng 0
Bình luận (0)
Trong mặt phẳng Oxy cho hai điểm \(A\left(5;5\right);B\left(3;-2\right)\). Một điểm M di động trên trục hoành Ox. Tìm giá trị nhỏ nhất của \(\left|\overrightarrow{MA}+\overrightarrow{MB}\right|\)

M thuộc trục hoành Ox nên \(M\left(x;0\right)\).
\(\overrightarrow{MA}\left(5-x;5\right);\overrightarrow{MB}\left(3-x;-2\right)\)
\(\overrightarrow{MA}+\overrightarrow{MB}=\left(8-x;3\right)\)
Ta có:
\(\left|\overrightarrow{MA}+\overrightarrow{MB}\right|=\sqrt{\left(8-x\right)^2+3^2}\ge\sqrt{3^2}=3\).
Vậy giá trị nhỏ nhất của \(\left|\overrightarrow{MA}+\overrightarrow{MB}\right|\) bằng 3 khi x = 8 hay \(M\left(8;0\right)\).
Đúng 0
Bình luận (0)

Trong mặt phẳng tọa độ Oxy cho ba điểm A(-1; -2), B(3; 2), C(4; -1). Biết điểm E(a; b) di động trên đường thẳng AB sao chop \(\left|2\overrightarrow{EA}+3\overrightarrow{EB}-\overrightarrow{EC}\right|\) đạt Min. Tính \(a^2-b^2\)

\(\overrightarrow{AB}=\left(4;4\right);\overrightarrow{AE}=\left(a+1;b+2\right)\) mà E di động trên đường thẳng AB nên A,B,E thẳng hàng tương đương với \(\dfrac{a+1}{4}=\dfrac{b+2}{4}\) <=> \(a=b+1\).Vậy E(b+1;b)
Đặt \(\overrightarrow{u}=2\overrightarrow{EA}+3\overrightarrow{EB}-\overrightarrow{EC}\) => \(\overrightarrow{u}=\left(-1-4b;3-4b\right)\)
có : \(\left|2\overrightarrow{EA}+3\overrightarrow{EB}-\overrightarrow{EC}\right|=\left|\overrightarrow{u}\right|=\sqrt{\left(-1-4b\right)^2+\left(3-4b^2\right)}\)
Đặt : 1-4b = t => \(\left\{{}\begin{matrix}-1-4b=t-2\\3-4b=t+2\end{matrix}\right.\) khi đó \(\left|\overrightarrow{u}\right|=\sqrt{\left(t-2\right)^2+\left(t+2\right)^2}=\sqrt{2t^2+8}\ge2\sqrt{2}\)
\(\left|2\overrightarrow{EA}+3\overrightarrow{EB}-\overrightarrow{EC}\right|\)đạt GTNN khi và chỉ khi t =0 <=> b=1/4 => a=5/4
vậy \(a^2-b^2=\dfrac{3}{2}\)
Đúng 0
Bình luận (0)

Trên mặt phẳng Oxy, cho đường thẳng \(\Delta:x-y+2=0,\Delta':ax+by-2=0\left(-2\le b\le2\right)\) và điểm A (1;1). Tính giá trị của \(T=a^2+b^2\) biết \(\Delta'\) đi qua A và \(\cos\left(\Delta;\Delta'\right)\) đạt giá trị lớn nhất

1, Trong mặt phẳng tọa độ Oxy , cho M(1;-1) . N (3;2) , P(0;-5) lần lượt là trung điểm các cạnh BC, CA, AB của tam giác ABC Tìm tọa độ điểm A
2, Trong mặt phẳng tọa độ Oxy , cho A(1;3) , B(-1;-2) , C(1;5) . Tọa độ D trên trục Ox sao cho ABCD là hình thang có 2 đấy AB và CD là ?
Trong mặt phẳng tọa độ Oxy , cho B(2;3) , C(-1;-2) Điểm M thỏa mãn overrightarrow{2MB}+overrightarrow{3MC}overrightarrow{0} Tìm tọa độ điểm M
Trong mặt phẳng tọa độ Oxy , cho vecto overrightarrow{u}left(2;-4right),ove...
Đọc tiếp
1, Trong mặt phẳng tọa độ Oxy , cho M(1;-1) . N (3;2) , P(0;-5) lần lượt là trung điểm các cạnh BC, CA, AB của tam giác ABC Tìm tọa độ điểm A
2, Trong mặt phẳng tọa độ Oxy , cho A(1;3) , B(-1;-2) , C(1;5) . Tọa độ D trên trục Ox sao cho ABCD là hình thang có 2 đấy AB và CD là ?
Trong mặt phẳng tọa độ Oxy , cho B(2;3) , C(-1;-2) Điểm M thỏa mãn \(\overrightarrow{2MB}+\overrightarrow{3MC}=\overrightarrow{0}\) Tìm tọa độ điểm M
Trong mặt phẳng tọa độ Oxy , cho vecto \(\overrightarrow{u}=\left(2;-4\right),\overrightarrow{a}=\left(1;-2\right),\overrightarrow{b}=\left(1;-3\right)\)Biết \(\overrightarrow{u}=m\overrightarrow{a}+n\overrightarrow{b}\) tính m - n bẳng ?

(1) trong mặt phẳng tọa độ Oxy, cho hai vecto overrightarrow{a}left(1;-4right), overrightarrow{b}left(0;2right). tọa độ của vecto overrightarrow{u}2overrightarrow{a}-overrightarrow{b} là?(2) trong mặt phẳng tọa độ Oxy, cho hai vecto overrightarrow{a}left(-7;3right), overrightarrow{b}left(4;1right). tọa độ của vecto overrightarrow{u}overrightarrow{b}-2overrightarrow{a} là?(3) trong mặt phẳng tọa độ Oxy, cho hai vecto overrightarrow{u}left(-5;4right), overrightarrow{v}-3overrightarrow{j}. tọa độ c...
Đọc tiếp
(1) trong mặt phẳng tọa độ Oxy, cho hai vecto \(\overrightarrow{a}=\left(1;-4\right)\), \(\overrightarrow{b}=\left(0;2\right)\). tọa độ của vecto \(\overrightarrow{u}=2\overrightarrow{a}-\overrightarrow{b}\) là?
(2) trong mặt phẳng tọa độ Oxy, cho hai vecto \(\overrightarrow{a}=\left(-7;3\right)\), \(\overrightarrow{b}=\left(4;1\right)\). tọa độ của vecto \(\overrightarrow{u}=\overrightarrow{b}-2\overrightarrow{a}\) là?
(3) trong mặt phẳng tọa độ Oxy, cho hai vecto \(\overrightarrow{u}=\left(-5;4\right)\), \(\overrightarrow{v}=-3\overrightarrow{j}\). tọa độ của vecto \(\overrightarrow{a}=2\overrightarrow{u}-5\overrightarrow{v}\) là?
(4) trong mặt phẳng tọa độ Oxy, cho hai điểm A (1;1), B (4;-7) và \(\overrightarrow{OM}=2\overrightarrow{OA}-5\overrightarrow{OB}\). tổng hoành độ và tung độ của điểm M là?
giúp mk vs ạ mk cần gấp thank


(1); vecto u=2*vecto a-vecto b
=>\(\left\{{}\begin{matrix}x=2\cdot1-0=2\\y=2\cdot\left(-4\right)-2=-10\end{matrix}\right.\)
(2): vecto u=-2*vecto a+vecto b
=>\(\left\{{}\begin{matrix}x=-2\cdot\left(-7\right)+4=18\\y=-2\cdot3+1=-5\end{matrix}\right.\)
(3): vecto a=2*vecto u-5*vecto v
\(\Leftrightarrow\left\{{}\begin{matrix}a=2\cdot\left(-5\right)-5\cdot0=-10\\b=2\cdot4-5\cdot\left(-3\right)=15+8=23\end{matrix}\right.\)
(4): vecto OM=(x;y)
2 vecto OA-5 vecto OB=(-18;37)
=>x=-18; y=37
=>x+y=19
Đúng 0
Bình luận (0)
SGK Cánh Diều trang 75,76
29 tháng 9 2023 lúc 23:23
Trong mặt phẳng toạ độ Oxy, cho đường thẳng Delta đi qua điểm {M_o}left( {{x_o};{y_o}} right) và có vectơ pháp tuyến overrightarrow n {rm{ }} left( {a;{rm{ }}b} right). Xét điểm M(x ; y) nằm trên Delta (Hình 28).a) Nhận xét về phương của hai vectơ overrightarrow n và overrightarrow {{M_o}M} .b) Tìm mối liên hệ giữa toạ độ của điểm M với toạ độ của điểm {M_o} và toạ độ của vectơ pháp tuyến overrightarrow n .
Đọc tiếp
Trong mặt phẳng toạ độ Oxy, cho đường thẳng \(\Delta \) đi qua điểm \({M_o}\left( {{x_o};{y_o}} \right)\) và có vectơ pháp tuyến \(\overrightarrow n {\rm{ }} = \left( {a;{\rm{ }}b} \right)\). Xét điểm M(x ; y) nằm trên \(\Delta \) (Hình 28).
a) Nhận xét về phương của hai vectơ \(\overrightarrow n \) và \(\overrightarrow {{M_o}M} \).
b) Tìm mối liên hệ giữa toạ độ của điểm M với toạ độ của điểm \({M_o}\) và toạ độ của vectơ pháp tuyến \(\overrightarrow n \).
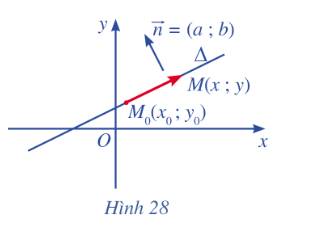
a) Phương của hai vecto \(\overrightarrow n \) và \(\overrightarrow {{M_o}M} \) vuông góc với nhau.
b) Ta có: \(\overrightarrow {{M_o}M} = \left( {x - {x_o};y - {y_o}} \right),\overrightarrow u = \left( {a;b} \right)\)
Xét điểm \(M\left( {x;y} \right) \in \Delta \). Vì \(\overrightarrow {{M_o}M} \bot \overrightarrow n \) nên: \(\overrightarrow {{M_o}M} .\overrightarrow n = 0 \Leftrightarrow a\left( {x - {x_o}} \right) + b\left( {y - {y_o}} \right) = 0 \Leftrightarrow ax + by - a{x_o} + b{y_o} = 0\)
Đúng 0
Bình luận (0)
SGK Cánh Diều trang 73,74
29 tháng 9 2023 lúc 23:21
Trong mặt phẳng toạ độ Oxy, cho đường thẳng Delta đi qua điểm {M_o}left( {{x_o};{y_o}} right) và có vectơ chỉ phươngoverrightarrow u {rm{ }} left( {a;{rm{ }}b} right) . Xét điểm M(x ; y) nằm trên Delta (Hình 26).a) Nhận xét về phương của hai vectơ overrightarrow u {rm{ }}vàoverrightarrow {{M_o}M} .b) Chứng minh có số thực t sao cho overrightarrow {{M_o}M} toverrightarrow u {rm{ }}.c) Biểu diễn toạ độ của điểm M qua toạ độ của điểm {M_o} và toạ độ của vectơ chỉ phương overrightarrow u {rm{...
Đọc tiếp
Trong mặt phẳng toạ độ Oxy, cho đường thẳng \(\Delta \) đi qua điểm \({M_o}\left( {{x_o};{y_o}} \right)\) và có vectơ chỉ phương\(\overrightarrow u {\rm{ }} = \left( {a;{\rm{ }}b} \right)\) . Xét điểm M(x ; y) nằm trên \(\Delta \) (Hình 26).
a) Nhận xét về phương của hai vectơ \(\overrightarrow u {\rm{ }}\)và\(\overrightarrow {{M_o}M} \) .
b) Chứng minh có số thực t sao cho \(\overrightarrow {{M_o}M} \) = \(t\overrightarrow u {\rm{ }}\).
c) Biểu diễn toạ độ của điểm M qua toạ độ của điểm \({M_o}\) và toạ độ của vectơ chỉ phương \(\overrightarrow u {\rm{ }}\).
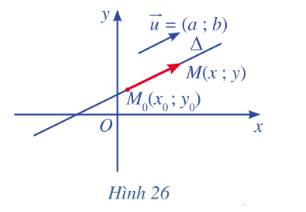
a) Hai vectơ \(\overrightarrow u {\rm{ }}\)và \(\overrightarrow {{M_o}M} \)cùng phương với nhau.
b) Xét \(M\left( {x;y} \right)\). Vì cùng phương với nên có số thực t sao cho \(\overrightarrow {{M_o}M} = t\overrightarrow u {\rm{ }}\)
c) Do \(\overrightarrow {{M_o}M} = \left( {x - {x_o};y - {y_o}} \right),\overrightarrow u = \left( {a;b} \right)\) nên:
\(\overrightarrow {{M_o}M} = t\overrightarrow u {\rm{ }} \Leftrightarrow \left\{ \begin{array}{l}x - {x_o} = at\\y - {y_o} = bt\end{array} \right. \Leftrightarrow \left\{ \begin{array}{l}x = {x_o} + at\\y = {y_o} + bt\end{array} \right.\)
Vậy tọa độ điểm M là: \(M\left( {{x_o} + at;{y_o} + bt} \right)\)
Đúng 0
Bình luận (0)