§4. Hệ trục tọa độ
Nội dung lý thuyết
1. Trục và độ dài đại số trên trục
a) Trục toạ độ (hay gọi tắt là trục) là một đường thẳng trên đó đã xác định một điểm \(O\) gọi là điểm gốc và một vectơ đơn vị \(\overrightarrow{e}\).
Ta kí hiệu trục đó là \(\left(O;\overrightarrow{e}\right)\).
b) Cho \(M\) là một điểm tuỳ ý thuộc trục \(\left(O;\overrightarrow{e}\right)\). Khi đó có duy nhất một số \(k\) sao cho \(\overrightarrow{OM}=k\overrightarrow{e}\). Ta gọi số \(k\) đó là toạ độ của điểm \(M\) đối với trục đã cho.

c) Cho hai điểm \(A,B\) trên trục \(\left(O;\overrightarrow{e}\right)\). Khi đó có duy nhất số \(a\) sao cho \(\overrightarrow{AB}=a\overrightarrow{e}\). Ta gọi số \(a\) đó là độ dài đại số của vectơ \(\overrightarrow{AB}\) đối với trục số đã cho và kí hiệu là \(a=\overline{AB}\).
Nhận xét:
+) Nếu \(\overrightarrow{AB}\) cùng hướng với \(\overrightarrow{e}\) thì \(\overline{AB}=AB\), còn nếu \(\overrightarrow{AB}\) ngược hướng với \(\overrightarrow{e}\) thì \(\overline{AB}=-AB\).
+) Nếu hai điểm \(A,B\) trên trục \(\left(O;\overrightarrow{e}\right)\) có toạ độ lần lượt là \(a\) và \(b\) thì \(\overline{AB}=b-a\).
2. Hệ trục toạ độ
a) Định nghĩa
Hệ trục toạ độ \(\left(O;\overrightarrow{i};\overrightarrow{j}\right)\) gồm hai trục \(\left(O;\overrightarrow{i}\right)\) và \(\left(O;\overrightarrow{j}\right)\) vuông góc với nhau. Điểm gốc \(O\) chung của hai trục gọi là gốc toạ độ. Trục \(\left(O;\overrightarrow{i}\right)\) được gọi là trục hoành và kí hiệu là \(Ox\), trục \(\left(O;\overrightarrow{j}\right)\) là trục tung và kí hiệu là \(Oy\). Các vectơ \(\overrightarrow{i}\) và \(\overrightarrow{j}\) là các vectơ đơn vị trên \(Ox\) và \(Oy\) và \(\left|\overrightarrow{i}\right|=\left|\overrightarrow{j}\right|=1\). Hệ trục toạ độ \(\left(O;\overrightarrow{i};\overrightarrow{j}\right)\) còn được kí hiệu là \(Oxy\).
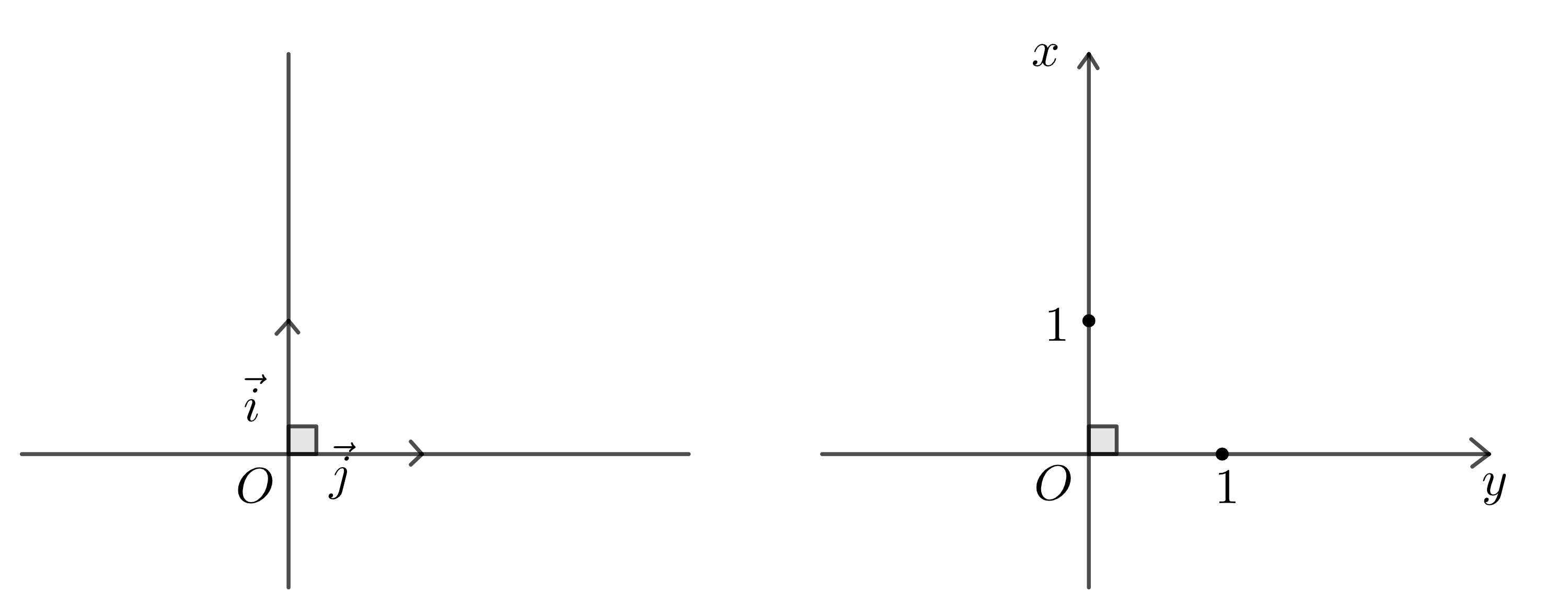
Mặt phẳng mà trên đó đã cho một hệ trục toạ độ \(Oxy\) được gọi là mặt phẳng toạ độ \(Oxy\) hay gọi tắt là mặt phẳng \(Oxy\).
b)Toạ độ của vectơ
Trong mặt phẳng \(Oxy\) cho một vectơ \(\overrightarrow{u}\) tuỳ ý. Vẽ \(\overrightarrow{OA}=\overrightarrow{u}\), gọi \(A_1,A_2\) lần lượt là hình chiếu của \(A\) lên \(Ox,Oy\). Ta có \(\overrightarrow{OA}=\overrightarrow{OA_1}+\overrightarrow{OA_2}\) và cặp số duy nhất \(\left(x;y\right)\) để \(\overrightarrow{OA_1}=x\overrightarrow{i}\) và \(\overrightarrow{OA_2}=y\overrightarrow{j}\). Như vậy \(\overrightarrow{u}=x\overrightarrow{i}+y\overrightarrow{j}\).
Cặp số \(\left(x;y\right)\) duy nhất đó được gọi là toạ độ của vectơ \(\overrightarrow{u}\) đối với hệ toạ độ \(Oxy\) và viết \(\overrightarrow{u}=\left(x;y\right)\) hoặc \(\overrightarrow{u}\left(x;y\right)\). Số thứ nhất \(x\) được gọi là hoành độ, số thứ hai \(y\) được gọi là tung độ của vectơ \(\overrightarrow{u}\).

Như vậy:
\(\overrightarrow{u}=\left(x;y\right)\) \(\Leftrightarrow\) \(\overrightarrow{u}=x\overrightarrow{i}+y\overrightarrow{j}\)
Nhận xét: Từ định nghĩa toạ độ của vectơ, ta thấy hai vectơ bằng nhau khi và chỉ khi chúng có hoành độ bằng nhau và tung độ bằng nhau.
Nếu \(\overrightarrow{u}=\left(x;y\right)\), \(\overrightarrow{u'}=\left(x';y'\right)\) thì \(\overrightarrow{u}=\overrightarrow{u'}\Leftrightarrow\left\{{}\begin{matrix}x=x'\\y=y'\end{matrix}\right.\)
Như vậy, mỗi vectơ được hoàn toàn xác định khi biết toạ độ của nó.
c) Toạ độ của một điểm
Trong mặt phẳng \(Oxy\) cho một điểm \(M\) tuỳ ý. Toạ độ của vectơ \(\overrightarrow{OM}\) đối với hệ trục \(Oxy\) được gọi là toạ độ của điểm \(M\) đối với hệ trục đó.
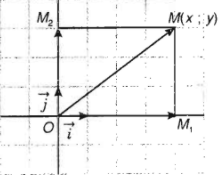
Như vậy, cặp số \(\left(x;y\right)\) là toạ độ của điểm \(M\) khi và chỉ khi \(\overrightarrow{OM}=\left(x;y\right)\). Khi đó ta viết \(M=\left(x;y\right)\) hoặc \(M\left(x;y\right)\). Số \(x\) được gọi là hoành độ, còn số \(y\) được gọi là tung độ của điểm \(M\). Hoành độ của điểm \(M\) còn được kí hiệu là \(x_M\), tung độ của điểm \(M\) còn được kí hiệu là \(y_M\).
\(M=\left(x;y\right)\Leftrightarrow\overrightarrow{OM}=x\overrightarrow{i}+y\overrightarrow{j}\)
Chú ý rằng, nếu \(MM_1\perp Ox,MM_2\perp Oy\) thì \(x=\overline{OM_1},y=\overline{OM_2}\).
Ví dụ 1: Trên trục \(\left(O;\overrightarrow{e}\right)\) lấy các điểm \(A,B,M,N\) có toạ độ lần lượt là \(-1,2,3,-2\).
Tính độ dài đại số của các vectơ \(\overrightarrow{AB}\) và \(\overrightarrow{MN}\) từ đó suy ra hai vectơ đó ngược hướng nhau.
Giải:
Ta có: \(A\) có toạ độ là \(-1\), \(B\) có toạ độ là \(2\) nên \(\overline{AB}=2-\left(-1\right)=3\)
\(M\) có toạ độ là \(3\), \(N\) có toạ độ là \(-2\) nên \(\overline{MN}=-2-3=-5\)
Nhận thấy: \(\overline{AB}=3=AB\) nên \(\overrightarrow{AB}\) cùng hướng với \(\overrightarrow{e}\), \(\overline{MN}=-5=-MN\) nên \(\overrightarrow{MN}\) ngược hướng với \(\overrightarrow{e}\)
Do đó \(\overrightarrow{AB}\) và \(\overrightarrow{MN}\) là hai vectơ ngược hướng.
d) Liên hệ giữa toạ độ điểm và toạ độ vectơ trong mặt phẳng
Cho hai điểm \(A\left(x_A;y_A\right)\) và \(B\left(x_B;y_B\right)\). Ta có
\(\overrightarrow{AB}=\left(x_B-x_A;y_B-y_A\right)\)
Ví dụ: Cho điểm \(A\left(3;-2\right)\) và \(B\left(1;4\right)\).
Khi đó ta có: \(x_B-x_A=1-3=-2\)
\(y_B-y_A=4-\left(-2\right)=6\)
Suy ra \(\overrightarrow{AB}=\left(-2;6\right)\).
@1946092@
3. Toạ độ của các vectơ \(\overrightarrow{u}+\overrightarrow{v}\), \(\overrightarrow{u}-\overrightarrow{v}\), \(k\overrightarrow{u}\)
Ta có các công thức sau:
Cho \(\overrightarrow{u}=\left(u_1;u_2\right)\), \(\overrightarrow{v}=\left(v_1;v_2\right)\). Khi đó:
\(\overrightarrow{u}+\overrightarrow{v}=\left(u_1+v_1;u_2+v_2\right)\) ;
\(\overrightarrow{u}-\overrightarrow{v}=\left(u_1-v_1;u_2-v_2\right)\) ;
\(k\overrightarrow{u}=\left(ku_1;ku_2\right),k\in R\).
Ví dụ 1: Cho \(\overrightarrow{a}=\left(1;-2\right)\), \(\overrightarrow{b}=\left(3;4\right)\) và \(\overrightarrow{c}=\left(5;-1\right)\). Tìm toạ độ của vectơ \(\overrightarrow{u}=2\overrightarrow{a}+\overrightarrow{b}-\overrightarrow{c}\).
Giải:
Ta có: \(\overrightarrow{a}=\left(1;-2\right)\) \(\Rightarrow2\overrightarrow{a}=\left(2;-4\right)\)
Nên \(2\overrightarrow{a}+\overrightarrow{b}=\left(2+3;-4+4\right)=\left(5;0\right)\)
\(2\overrightarrow{a}+\overrightarrow{b}-\overrightarrow{c}=\left(5-5;0-\left(-1\right)\right)=\left(0;1\right)\)
Vậy \(\overrightarrow{u}=2\overrightarrow{a}+\overrightarrow{b}-\overrightarrow{c}=\left(0;1\right)\).
Ví dụ 2: Cho \(\overrightarrow{a}=\left(1;-1\right)\) và \(\overrightarrow{b}=\left(2;1\right)\). Hãy phân tích vectơ \(\overrightarrow{c}=\left(4;-1\right)\) theo \(\overrightarrow{a}\) và \(\overrightarrow{b}\).
Giải:
Giả sử \(\overrightarrow{c}=h\overrightarrow{a}+k\overrightarrow{b}\) thì \(\overrightarrow{c}=\left(k+2h;-k+h\right)\)
Ta có: \(\left\{{}\begin{matrix}k+2h=4\\-k+h=-1\end{matrix}\right.\Leftrightarrow\left\{{}\begin{matrix}k=2\\h=1\end{matrix}\right.\)
Vậy \(\overrightarrow{c}=2\overrightarrow{a}+\overrightarrow{b}\).
@1947804@
Nhận xét: Hai vectơ \(\overrightarrow{u}=\left(u_1;u_2\right)\), \(\overrightarrow{v}=\left(v_1;v_2\right)\) với \(\overrightarrow{v}\ne\overrightarrow{0}\) cùng phương khi và chỉ khi có một số \(k\) sao cho \(u_1=kv_1\) và \(u_2=kv_2\).
@1945366@
4. Toạ độ trung điểm của đoạn thẳng. Toạ độ trọng tâm của tam giác
a) Cho đoạn thẳng \(AB\) có \(A\left(x_A;y_A\right)\) và \(B\left(x_B;y_B\right)\). Toạ độ trung điểm \(I\left(x_I;y_I\right)\) của đoạn thẳng \(AB\) là: \(x_I=\dfrac{x_A+x_B}{2}\) ; \(y_I=\dfrac{y_A+y_B}{2}\).
b) Cho tam giác \(ABC\) có \(A\left(x_A;y_A\right)\), \(B\left(x_B;y_B\right)\) và \(C\left(x_C;y_C\right)\). Khi đó toạ độ của trọng tâm \(G\left(x_G;y_G\right)\) của tam giác \(ABC\) được tính theo công thức:
\(x_G=\dfrac{x_A+x_B+x_C}{3}\) ; \(y_G=\dfrac{y_A+y_B+y_C}{3}\).
Ví dụ 1: Cho \(A\left(2;0\right),B\left(0;4\right)\) và \(C\left(1;3\right)\). Tìm toạ độ trung điểm \(I\) của đoạn thẳng \(AB\) và trọng tâm \(G\) của tam giác \(ABC\).
Giải:
Ta có: \(x_I=\dfrac{x_A+x_B}{2}=\dfrac{2+0}{2}=1\) ; \(y_I=\dfrac{y_A+y_B}{2}=\dfrac{0+4}{2}=2\) \(\Rightarrow I=\left(1;2\right)\)
Lại có: \(x_G=\dfrac{x_A+x_B+x_C}{3}=\dfrac{2+0+1}{3}=1\) ; \(y_G=\dfrac{y_A+y_B+y_C}{3}=\dfrac{0+4+3}{3}=\dfrac{7}{3}\) \(\Rightarrow G\left(1;\dfrac{7}{3}\right)\)
@1945836@