Bài 5: Động năng. Thế năng. Sự chuyển hoá năng lượng trong dao động điều hoà
Nội dung lý thuyết
I. ĐỘNG NĂNG
- Động năng của vật dao động điều hoà được xác định bởi biểu thức:
\(W_d=\dfrac{1}{2}mv^2\). Thay \(v=-\omega Asin\left(\omega t+\varphi\right)\) vào, ta được:
\(W_d=\dfrac{1}{2}m\omega^2A^2sin^2\left(\omega t+\varphi\right)\)
\(W_d=\dfrac{1}{2}m\omega^2A^2\left[1-cos^2\left(\omega t+\varphi\right)\right]\)
Thay \(x=Acos\left(\omega t+\varphi\right)\) vào ta được:
\(W_d=\dfrac{1}{2}m\omega^2\left(A^2-x^2\right)\) (5.1)
- Công thức (5.1) cho biết sự biến thiên của động năng theo li độ x.
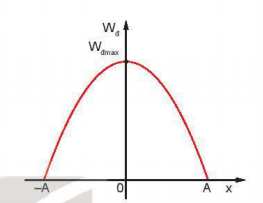
Hình 5.1 là đồ thị chỉ sự biến thiên của động năng theo li độ x. Đó là một đường parabol có 1 bề lõm hướng xuống và có giá trị cực đại: \(W_{dmax}=\dfrac{1}{2}m\omega^2A^2\)
Đồ thị cho thấy, khi vật đi từ vị trí cân bằng tới vị trí biên thì động năng của vật đang từ cực đại giảm đến 0. Khi vật đi từ vị trí biên về vị trí cân bằng thì động năng của vật tăng từ 0 đến giá trị cực đại.
II. THẾ NĂNG
- Theo định luật bảo toàn năng lượng, nếu bỏ qua ma sát thì động năng của vật không mất đi mà chuyển dần thành thế năng của vật và ngược lại. Vì thế ta có thể viết:
\(W_t=\dfrac{1}{2}W_{dmax}-W_{d\left(x\right)}=\dfrac{1}{2}m\omega^2A^2-\left[\dfrac{1}{2}m\omega^2A^2-\dfrac{1}{2}m\omega^2x^2\right]\)
\(W_t=\dfrac{1}{2}m\omega^2x^2\) (5.2)
Công thức (5.2) cho biết sự biến thiên của thế năng theo li độ.
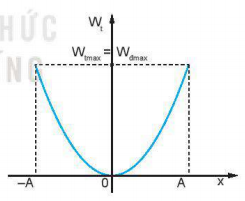
- Đồ thị biến thiên của thế năng theo li độ x cũng là một đường parabol nhưng bề lõm 1 hướng lên như Hình 5.2 và có giá trị cực đại: \(W_{tmax}=W_{dmax}=\dfrac{1}{2}m\omega^2A^2\)
III. CƠ NĂNG
Trong dao động điều hòa, có sự chuyển hóa qua lại giữa động năng và thế năng của vật, còn cơ năng, tức tổng động năng và thế năng thì được bảo toàn.
\(W=W_d+Wt=\dfrac{1}{2}m\omega^2A^2\) (5.3)
IV. CƠ NĂNG CỦA CON LẮC ĐƠN VÀ CON LẮC LÒ XO
1. Con lắc lò xo
Ta biết nếu bỏ qua ma sát thì dao động của con lắc lò xo là dao động điều hòa. Thế năng của con lắc lò xo là thế năng đàn hồi của lò xo khi bị biến dạng.
Người ta đã chứng minh được rằng, nếu chọn mốc thế năng ở vị trí cân bằng thì thế năng của con lắc lò xo khi vật ở li độ x là:
\(W_t=\dfrac{1}{2}kx^2\) (5.4)
với k là độ cứng của lò xo.
So sánh (5.4) với (5.2) ta suy ra \(\omega=\sqrt{\dfrac{k}{m}}\) và chu kì của con lắc lò xo là: \(T=2\pi\sqrt{\dfrac{m}{k}}\) (5.5)
Cơ năng của con lắc lò xo là:
\(W=W_d+W_t=\dfrac{1}{2}mv^2+\dfrac{1}{2}kx^2\)
\(W=\dfrac{1}{2}m\omega^2A^2sin^2\left(\omega t+\varphi\right)+\dfrac{1}{2}m\omega^2A^2cos^2\left(\omega t+\varphi\right)\)
\(=\dfrac{1}{2}m\omega^2A^2\left[sin^2\left(\omega t+\varphi\right)+cos^2\left(\omega t+\varphi\right)\right]\)
\(=\dfrac{1}{2}m\omega^2A^2=\) hằng số. (5.6)
2. Con lắc đơn
Vị trí của con lắc đơn được xác định bằng li độ dài s hay li độ góc \(\alpha\) (Hình 5.6).
Thế năng của con lắc đơn là thế năng trọng trường.

Chọn mốc thế năng ở vị trí cân bằng thì thế năng của con lắc ở li độ góc \(\alpha\) là:
\(W_t=mgl\left(1-cos\alpha\right)\) (5.7)
Ta có: \(\left(1-cos\alpha\right)=2sin^2\dfrac{\alpha}{2}\), với \(\alpha\) nhỏ \(sin\dfrac{\alpha}{2}\approx\dfrac{\alpha}{2}\) (\(\alpha\)tính theo rad)
Khi đó \(W_t=mgl\dfrac{\alpha^2}{2}\), với \(\alpha=\dfrac{s}{l}\)
Suy ra: \(W_t=mgl\dfrac{s^2}{2l^2}=\dfrac{1}{2}m\dfrac{g}{l}s^2\) (5.8)
Tại vị trí biên, li độ dài s của con lắc cực đại bằng A. Khi đó, động năng của con lắc bằng 0, do đó thế năng của con lắc bằng cơ năng.
So sánh biểu thức (5.8) và (5.3), ta suy ra \(\omega=\sqrt{\dfrac{g}{l}}\).
Biểu thức (5.8) được viết: \(W_t=\dfrac{1}{2}m\omega^2A^2cos^2\left(\omega t+\varphi\right)\)
Động năng của con lắc ở li độ góc \(\alpha\) là động năng của vật m:
\(W_d=\dfrac{1}{2}mv^2=\dfrac{1}{2}m\omega^2A^2sin^2\left(\omega t+\varphi\right)\)
Tương tự với con lắc lò xo ta có: \(W=\dfrac{1}{2}m\omega^2A^2=\) hằng số.
@9049903@