Bài 4: Ôn tập chương Phương pháp tọa độ trong không gian
Nội dung lý thuyết
I. HỆ TOẠ ĐỘ TRONG KHÔNG GIAN
1. Toạ độ điểm và vectơ
Trong không gian, các trục \(x'Ox,y'Oy,z'Oz\) vuông góc với nhau từng đôi một. Gọi \(\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}\) lần lượt là các vectơ đơn vị trên các trục \(x'Ox,y'Oy,z'Oz\).
Hệ ba trục như vậy được gọi là hệ trục toạ độ Đề-các vuông góc \(Oxyz\) trong không gian, hay được gọi đơn giản là hệ toạ độ \(Oxyz\).
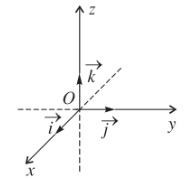
Điểm \(O\) được gọi là gốc toạ độ.
Các mặt phẳng \(\left(Oxy\right),\left(Oyz\right),\left(Ozx\right)\) đôi một vuông góc với nhau được gọi là các mặt phẳng toạ độ.
Vì \(\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}\) là ba vectơ đơn vị đôi một vuông góc với nhau nên
\(\overrightarrow{i}^2=\overrightarrow{j}^2=\overrightarrow{k}^2=1\)
và \(\overrightarrow{i}.\overrightarrow{j}=\overrightarrow{j}.\overrightarrow{k}=\overrightarrow{k}.\overrightarrow{i}=0\)
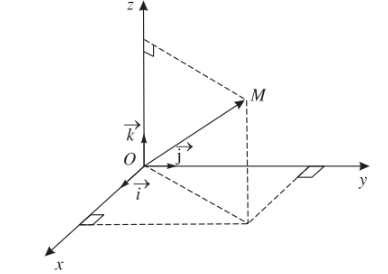
- Toạ độ của điểm \(M\) đối với hệ trục toạ độ \(Oxyz\) là bộ ba số \(\left(x;y;z\right)\) duy nhất sao cho \(\overrightarrow{OM}=x\overrightarrow{i}+y\overrightarrow{j}+z\overrightarrow{k}\)
Ta viết: \(M\left(x;y;z\right)\) hoặc \(M=\left(x;y;z\right)\).
- Trong không gian \(Oxyz\) cho vectơ \(\overrightarrow{a}\). Khi đó luôn tồn tại duy nhất bộ ba số \(\left(a_1;a_2;a_3\right)\) sao cho \(\overrightarrow{a}=a_1\overrightarrow{i}+a_2\overrightarrow{j}+a_3\overrightarrow{k}\).
Ta gọi bộ ba số \(\left(a_1;a_2;a_3\right)\) là toạ độ vectơ \(\overrightarrow{a}\) đối với hệ toạ độ \(Oxyz\) cho trước và viết \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) hoặc \(\overrightarrow{a}\left(a_1;a_2;a_3\right)\).
Nhận xét: Trong hệ toạ độ \(Oxyz\), toạ độ điểm \(M\) chính là toạ độ vectơ \(\overrightarrow{OM}\).
Ta có \(M=\left(x;y;z\right)\Leftrightarrow\overrightarrow{OM}=\left(x;y;z\right)\).
2. Biểu thức toạ độ và các phép toán vectơ
Trong không gian \(Oxyz\) cho hai vectơ \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{b}=\left(b_1;b_2;b_3\right)\). Ta có:
\(\overrightarrow{a}+\overrightarrow{b}=\left(a_1+b_1;a_2+b_2;a_3+b_3\right)\) ;
\(\overrightarrow{a}-\overrightarrow{b}=\left(a_1-b_1;a_2-b_2;a_3-b_3\right)\) ;
\(k\overrightarrow{a}=k\left(a_1;a_2;a_3\right)=\left(ka_1;ka_2;ka_3\right)\) với \(k\) là một số thực.
Hệ quả:
a) Cho hai vectơ \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{b}=\left(b_1;b_2;b_3\right)\).
Ta có: \(\overrightarrow{a}=\overrightarrow{b}\Leftrightarrow\left\{{}\begin{matrix}a_1=b_1\\a_2=b_2\\a_3=b_3\end{matrix}\right.\).
b) Vectơ \(\overrightarrow{0}\) có toạ độ là \(\left(0;0;0\right)\).
c) Với \(\overrightarrow{b}\ne\overrightarrow{0}\) thì hai vectơ \(\overrightarrow{a}\) và \(\overrightarrow{b}\) cùng phương khi và chỉ khi có một số thực \(k\) sao cho \(a_1=kb_1,a_2=kb_2,a_3=kb_3\).
d) Trong không gian nếu cho hai điểm \(A\left(x_A;y_A;z_A\right)\) và \(B\left(x_B;y_B;z_B\right)\) thì:
\(\overrightarrow{AB}=\overrightarrow{OB}-\overrightarrow{OA}=\left(x_B-x_A;y_B-y_A;z_B-z_A\right)\)
Toạ độ trung điểm \(M\) của đoạn thẳng \(AB\) là \(M\left(\dfrac{x_A+x_B}{2};\dfrac{y_A+y_B}{2};\dfrac{z_A+z_B}{2}\right)\).
3. Biểu thức toạ độ của tích vô hướng
Trong không gian \(Oxyz\), tích vô hướng của hai vectơ \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{b}=\left(b_1;b_2;b_3\right)\) được xác định bởi công thức:
\(\overrightarrow{a}.\overrightarrow{b}=a_1b_1+a_2b_2+a_3b_3\)
- Ứng dụng:
a) Độ dài của vectơ : Cho vectơ \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\). Độ dài của vectơ \(\overrightarrow{a}\) là \(\left|\overrightarrow{a}\right|=\sqrt{a_1^2+a_2^2+a_3^2}\).
b) Khoảng cách giữa hai điểm: Trong không gian cho hai điểm \(A\left(x_A;y_A;z_A\right)\) và \(B\left(x_B;y_B;z_B\right)\). Khoảng cách giữa hai điểm này chính là độ dài vectơ \(\overrightarrow{AB}\), ta có:
\(AB=\left|\overrightarrow{AB}\right|=\sqrt{\left(x_B-x_A\right)^2+\left(y_B-y_A\right)^2+\left(z_B-z_A\right)^2}\)
c) Góc giữa hai vectơ : Nếu \(\varphi\) là góc giữa hai vectơ \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{b}=\left(b_1;b_2;b_3\right)\) với \(\overrightarrow{a},\overrightarrow{b}\ne\overrightarrow{0}\) thì \(\cos\varphi=\dfrac{\overrightarrow{a}.\overrightarrow{b}}{\left|\overrightarrow{a}\right|.\left|\overrightarrow{b}\right|}\).
Do đó: \(\cos\varphi=\cos\left(\overrightarrow{a},\overrightarrow{b}\right)=\dfrac{a_1b_1+a_2b_2+a_3b_3}{\sqrt{a_1^2+a_2^2+a_2^3}.\sqrt{b_1^2+b_2^2+b_3^2}}\).
Từ đó suy ra \(\overrightarrow{a}\perp\overrightarrow{b}\Leftrightarrow a_1b_1+a_2b_2+a_3b_3=0\).
II. PHƯƠNG TRÌNH MẶT CẦU
Trong không gian \(Oxyz\), mặt cầu \(\left(S\right)\) tâm \(I\left(a;b;c\right)\) bán kính \(r\) có phương trình là:
\(\left(x-a\right)^2+\left(y-b\right)^2+\left(z-c\right)^2=r^2\).
Nhận xét: Phương trình mặt cầu có thể được viết dưới dạng
\(x^2+y^2+z^2-2ax-2by-2cz+d=0\) với \(d=a^2+b^2+c^2-r^2\).
Giao của mặt cầu và mặt phẳng:
Cho mặt cầu \(S\left(O;r\right)\) và mặt phẳng \(\left(P\right)\). Gọi \(h\) là khoảng cách từ \(O\) đến \(mp\left(P\right)\).
- Trường hợp \(h>r\): Khi đó mặt phẳng \(\left(P\right)\) không có điểm chung với mặt cầu \(S\left(O;r\right)\).
- Trường hợp \(h=r\): Khi đó mặt phẳng \(\left(P\right)\) tiếp xúc với mặt cầu \(S\left(O;r\right)\) tại điểm \(H\).
Điều kiện cần và đủ để mặt phẳng \(\left(P\right)\) tiếp xúc với mặt cầu \(S\left(O;r\right)\) tại điểm \(H\) là \(\left(P\right)\) vuông góc với bán kính \(OH\) tại \(H\).
- Trường hợp \(h< r\): Mặt phẳng cắt mặt cầu theo đường tròn tâm \(H\), bán kính \(r'=\sqrt{r^2-h^2}\).
Giao của mặt cầu và đường thẳng:
Cho mặt cầu \(S\left(O;r\right)\) và đường thẳng \(\Delta\). Gọi \(d\) là khoảng cách từ \(O\) tới \(\Delta\).
- Trường hợp \(d>r\): \(\Delta\) không cắt mặt cầu \(S\left(O;r\right)\).
- Trường hợp \(d=r\): \(\Delta\) tiếp xúc với mặt cầu \(S\left(O;r\right)\) tại điểm \(H\).
Điều kiện cần và đủ để đường thẳng \(\Delta\) tiếp xúc với mặt cầu \(S\left(O;r\right)\) tại điểm \(H\) là \(\Delta\) vuông góc với bán kính \(OH\) tại điểm \(H\) đó.
- Trường hợp \(d< r\): \(\Delta\) cắt mặt cầu \(S\left(O;r\right)\) tại hai điểm phân biệt.
@2608167@
III. PHƯƠNG TRÌNH MẶT PHẲNG
1. Vectơ pháp tuyến của mặt phẳng
Cho mặt phẳng \(\left(\alpha\right)\). Nếu vectơ \(\overrightarrow{n}\) khác \(\overrightarrow{0}\) và có giá vuông góc với mặt phẳng \(\left(\alpha\right)\) thì \(\overrightarrow{n}\) được gọi là vectơ pháp tuyến của mặt phẳng \(\left(\alpha\right)\).
Chú ý: Nếu \(\overrightarrow{n}\) là vectơ pháp tuyến của mặt phẳng \(\left(\alpha\right)\) thì \(k\overrightarrow{n}\) với \(k\ne0\) cũng là vectơ pháp tuyến của mặt phẳng đó.
Trong không gian \(Oxyz\) cho mặt phẳng \(\left(\alpha\right)\) và hai vectơ không cùng phương \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{b}=\left(b_1;b_2;b_3\right)\) có giá song song hoặc nằm trong mặt phẳng \(\left(\alpha\right)\).
Khi đó mặt phẳng \(\left(\alpha\right)\) nhận vectơ \(\overrightarrow{n}=\left(a_2b_3-a_3b_2;a_3b_1-a_1b_3;a_1b_2-a_2b_1\right)\) làm vectơ pháp tuyến.
Vectơ \(\overrightarrow{n}\) xác định như trên được gọi là tích có hướng (hay tích vectơ) của hai vectơ \(\overrightarrow{a}\) và \(\overrightarrow{b}\), kí hiệu là \(\overrightarrow{n}=\overrightarrow{a}\Lambda\overrightarrow{b}\) hoặc \(\overrightarrow{n}=\left[\overrightarrow{a},\overrightarrow{b}\right]\).
2. Phương trình tổng quát của mặt phẳng
Phương trình có dạng \(Ax+By+Cz+D=0\), trong đó \(A,B,C\) không đồng thời bằng 0, được gọi là phương trình tổng quát của mặt phẳng.
Nhận xét:
a) Nếu mặt phẳng \(\left(\alpha\right)\) có phương trình tổng quát là \(Ax+By+Cz+D=0\) thì nó có một vectơ pháp tuyến là \(\overrightarrow{n}=\left(A;B;C\right)\).
b) Phương trình mặt phẳng đi qua điểm \(M\left(x_0;y_0;z_0\right)\) nhận vectơ \(\overrightarrow{n}\left(A;B;C\right)\) khác \(\overrightarrow{0}\) làm vectơ pháp tuyến là \(A\left(x-x_0\right)+B\left(y-y_0\right)+C\left(z-z_0\right)=0\).
Các trường hợp riêng:
Trong không gian \(Oxyz\) cho mặt phẳng \(\left(\alpha\right)\): \(Ax+By+Cz+D=0\).
a) Nếu \(D=0\): Mặt phẳng \(\left(\alpha\right)\) đi qua gốc toạ độ \(O\).
b) Nếu một trong ba hệ số \(A,B,C\) bằng 0, chẳng hạn \(A=0\) thì mặt phẳng \(\left(\alpha\right)\) song song hoặc chứa trục \(Ox\).
c) Nếu hai trong ba hệ số \(A,B,C\) bằng 0, chẳng hạn \(A=B=0,C\ne0\) thì mặt phẳng \(\left(\alpha\right)\) song song hoặc trùng với mặt phẳng \(\left(Oxy\right)\).
Nhận xét: Nếu cả bốn hệ số \(A,B,C,D\) đều khác 0 thì bằng cách đặt \(a=-\dfrac{D}{A},b=-\dfrac{D}{B},c=-\dfrac{D}{C}\) ta có thể đưa phương trình tổng quát về dạng như sau:
\(\dfrac{x}{a}+\dfrac{y}{b}+\dfrac{z}{c}=1\).
Phương trình này gọi là phương trình của mặt phẳng theo đoạn chắn.
3. Điều kiện để hai mặt phẳng song song, vuông góc
Trong không gian \(Oxyz\) cho hai mặt phẳng:
\(\left(\alpha_1\right):A_1x+B_1y+C_1z+D_1=0\) ;
\(\left(\alpha_2\right):A_2x+B_2y+C_2z+D_2=0\)
Khi đó \(\left(\alpha_1\right)\) và \(\left(\alpha_2\right)\) có hai vectơ pháp tuyến lần lượt là \(\overrightarrow{n_1}\left(A_1;B_1;C_1\right)\) và \(\overrightarrow{n_2}\left(A_2;B_2;C_2\right)\).
- Hai mặt phẳng \(\left(\alpha_1\right)\) và \(\left(\alpha_2\right)\) song song hoặc trùng nhau khi và chỉ khi hai vectơ pháp tuyến \(\overrightarrow{n_1}\) và \(\overrightarrow{n_2}\) của chúng cùng phương.
\(\left(\alpha_1\right)\)//\(\left(\alpha_2\right)\) \(\Leftrightarrow\left\{{}\begin{matrix}\overrightarrow{n_1}=k\overrightarrow{n_2}\\D_1\ne kD_2\end{matrix}\right.\Leftrightarrow\left\{{}\begin{matrix}\left(A_1;B_1;C_1\right)=k\left(A_2;B_2;C_2\right)\\D_1\ne kD_2\end{matrix}\right.\)
\(\left(\alpha_1\right)\)\(\equiv\)\(\left(\alpha_2\right)\) \(\Leftrightarrow\left\{{}\begin{matrix}\overrightarrow{n_1}=k\overrightarrow{n_2}\\D_1=kD_2\end{matrix}\right.\Leftrightarrow\left\{{}\begin{matrix}\left(A_1;B_1;C_1\right)=k\left(A_2;B_2;C_2\right)\\D_1=kD_2\end{matrix}\right.\).
Chú ý: \(\left(\alpha_1\right)\) cắt \(\left(\alpha_2\right)\) \(\Leftrightarrow\overrightarrow{n_1}\ne k\overrightarrow{n_2}\Leftrightarrow\left(A_1;B_1;C_1\right)\ne k\left(A_2;B_2;C_2\right)\).
- Hai mặt phẳng \(\left(\alpha_1\right)\) và \(\left(\alpha_2\right)\) vuông góc với nhau khi và chỉ khi hai vectơ pháp tuyến \(\overrightarrow{n_1}\) và \(\overrightarrow{n_2}\) tương ứng của chúng vuông góc với nhau.
\(\left(\alpha_1\right)\perp\left(\alpha_2\right)\Leftrightarrow\overrightarrow{n_1}.\overrightarrow{n_2}=0\Leftrightarrow A_1A_2+B_1B_2+C_1C_2=0\).
4. Khoảng cách từ một điểm đến một mặt phẳng
Trong không gian \(Oxyz\) cho mặt phẳng \(\left(\alpha\right)\) có phương trình \(Ax+By+Cz+D=0\) và điểm \(M_0\left(x_0;y_0;z_0\right)\). Khoảng cách từ điểm \(M_0\left(x_0;y_0;z_0\right)\) đến mặt phẳng \(\left(\alpha\right)\) kí hiệu là \(d\left(M_0,\left(\alpha\right)\right)\) được tính theo công thức
\(d\left(M_0,\left(\alpha\right)\right)=\dfrac{\left|Ax_0+By_0+Cz_0+D\right|}{\sqrt{A^2+B^2+C^2}}\).
@75979@
IV. PHƯƠNG TRÌNH ĐƯỜNG THẲNG
1. Phương trình tham số của đường thẳng
Định nghĩa: Vectơ \(\overrightarrow{u}\ne\overrightarrow{0}\) có giá song song hoặc trùng với đường thẳng \(d\) được gọi là vectơ chỉ phương của đường thẳng \(d\).
Định lí:
Phương trình tham số của đường thẳng \(\Delta\) đi qua điểm \(M\left(x_0;y_0;z_0\right)\) và nhận \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) làm vectơ chỉ phương là phương trình có dạng
\(\left\{{}\begin{matrix}x=x_0+ta_1\\y=y_0+ta_2\\z=z_0+ta_3\end{matrix}\right.\)
trong đó \(t\) là tham số.
Chú ý: Nếu \(a_1,a_2,a_3\ne0\) thì \(\Delta\) còn viết dưới dạng phương trình chính tắc có dạng
\(\dfrac{x-x_0}{a_1}=\dfrac{y-y_0}{a_2}=\dfrac{z-z_0}{a_3}\)
2. Vị trí tương đối của hai đường thẳng
- Điều kiện để hai đường thẳng song song, trùng nhau:
Gọi \(\overrightarrow{a}=\left(a_1;a_2;a_3\right)\) và \(\overrightarrow{a'}=\left(a'_1;a'_2;a'_3\right)\) lần lượt là vectơ chỉ phương của hai đường thẳng \(d\) và \(d'\). Lấy \(M\left(x_0;y_0;z_0\right)\in d\).
+) \(d\equiv d'\Leftrightarrow\left\{{}\begin{matrix}\overrightarrow{a}=k\overrightarrow{a'}\\M\in d'\end{matrix}\right.\).
+) \(d\) // \(d'\) \(\Leftrightarrow\left\{{}\begin{matrix}\overrightarrow{a}=k\overrightarrow{a'}\\M\notin d'\end{matrix}\right.\).
- Điều kiện để hai đường thẳng cắt nhau:
Hai đường thẳng \(d\) và \(d'\) cắt nhau khi và chỉ khi hệ phương trình ẩn \(t,t'\) sau
\(\left\{{}\begin{matrix}x_0+ta_1=x'_0+t'a'_1\\y_0+ta_2=y'_0+t'a'_2\\z_0+ta_3=z'_0+t'a'_3\end{matrix}\right.\) \(\left(I\right)\)
có đúng 1 nghiệm.
Chú ý: Giả sử hệ \(\left(I\right)\) có nghiệm \(\left(t_0;t'_0\right)\), để tìm điểm \(M\) là giao điểm của \(d\) và \(d'\) ta có thể thay \(t_0\) vào phương trình tham số của \(d\) hoặc \(t'_0\) vào phương trình tham số của \(d'\).
- Điều kiện để hai đường thẳng chéo nhau:
Hai đường thẳng \(d\) và \(d'\) chéo nhau khi và chỉ khi \(\overrightarrow{a}\) và \(\overrightarrow{a'}\) không cùng phương và hệ phương trình
\(\left\{{}\begin{matrix}x_0+ta_1=x'_0+t'a'_1\\y_0+ta_2=y'_0+t'a'_2\\z_0+ta_3=z'_0+t'a'_3\end{matrix}\right.\)
vô nghiệm.
Chú ý: Hai đường thẳng \(d\) và \(d'\) vuông góc với nhau khi và chỉ khi \(\overrightarrow{a}.\overrightarrow{a'}=0\).
3. Vị trí tương đối của mặt phẳng và đường thẳng
Trong không gian cho đường thẳng \(d:\begin{cases}x=x_0+ta_1\\y=y_0+ta_2\\z=z_0+ta_3\end{cases}\) và mặt phẳng \(\left(\alpha\right):Ax+By+Cz+D=0\).
Xét phương trình : \(A\left(x_0+ta_1\right)+B\left(y_0+ta_2\right)+C\left(z_0+ta_3\right)+D=0\) (t là ẩn) (1)
+) \(d\) // \(\left(\alpha\right)\) \(\Leftrightarrow\) (1) vô nghiệm
+) \(d\) cắt \(\left(\alpha\right)\) \(\Leftrightarrow\) (1) có đúng 1 nghiệm \(t=t_0\). Khi đó toạ độ giao điểm là \(M\left(x_0+t_0a_1;y_0+t_0a_2;z_0+t_0a_3\right)\)
+) \(d\) \(\subset\) \(\left(\alpha\right)\) \(\Leftrightarrow\) (1) có vô số nghiệm.
@2609221@