Một lò xo có độ cứng 100N/m treo thẳng đứng. Đầu dưới móc vật nặng 1kg. Lấy g= 10m/s^2.
a. Tính độ dãn của lò xo tại vị trí cân bằng?
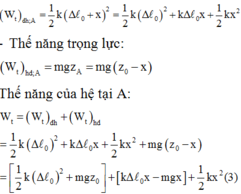
b. Kéo vật xuống dưới 2cm (kể từ vị trí cân bằng O). Tính thế năng trọng trường của vật và thế năng đàn hồi của lò xo và thế năng của hệ. Lấy gốc thế năng ở vị trí cân bằng O.