Đặc điểm của động cơ đốt trong kéo máy phát điện:
A. Là động cơ xăng hoặc điêzen có công suất phù hợp với công suất máy phát
B. Tốc độ quay phù hợp tốc độ quay máy phát
C. Có bộ điều tốc để giữ ổn định tốc độ quay của động cơ
D. Cả 3 đáp án trên
Nối hai cực của một máy phát điện xoay chiều vào hai đầu đoạn mạch RLC. Khi máy phát quay với tốc độ n vòng/phút thì trong mạch có cộng hưởng và công suất tiêu thụ đạt cực đại là P 0 . Khi máy quay với tốc độ 2n vòng/phút thì công suất tiêu thụ là 2 P 0 5 . Khi máy quay với tốc độ 3n vòng/phút thì hệ số công suất của đoạn mạch là
A. 0,5
B. 3 265
C. 3 34
D. 3 2

Khi ω = ω 1 mạch xảy ra cộng hưởng, chuẩn hóa R = 1 Z L = Z = 1
Khi ω = 2 ω 1 thì
P = 4 U 2 R cos 2 φ = 2 5 U 2 R ⇒ cos φ = 1 10
c o s φ = 1 10 = 1 1 + 2 X − X 2 2 ⇒ X = 2
Khi ω = 3 ω 1 thì hệ số công suất của mạch sẽ là:
c o s φ = 1 1 + 3 X − X 3 2 = 3 265
Đáp án B
Nối hai cực của một máy phát điện xoay chiều một pha vào hai đầu đoạn mạch RLC. Bỏ qua điện trở dây nối, coi từ thông cực đại gửi qua các cuộn dây của máy phát không đổi. Khi rôto máy phát quay với tốc độ n (vòng/phút) thì công suất tiêu thụ điện của mạch là P, hệ số công suất của mạch là 1 / 2 Khi rôto máy phát quay với tốc độ 2n (vòng/phút) thì công suất tiêu thụ điện của mạch là 4P. Khi rôto máy phát quay với tốc độ 2 n (vòng/phút) thì công suất tiêu thụ điện của mạch là
A. 8P/3
B. 1,414P
C. 4P
D. 2P
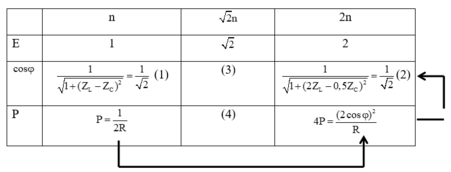
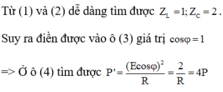
Đáp án C
Chú ý E tỉ lệ thuận với n. Chuẩn hóa R = 1. Áp dụng công thức tính ![]()
Nối hai cực của một máy phát điện xoay chiều một pha vào hai đầu đoạn mạch RLC. Bỏ qua điện trở dây nối, coi từ thông cực đại gửi qua các cuộn dây của máy phát không đổi. Khi rôto máy phát quay với tốc độ n (vòng/phút) thì công suất tiêu thụ điện của mạch là P, hệ số công suất của mạch là 1 2 Khi rôto máy phát quay với tốc độ 2n (vòng/phút) thì công suất tiêu thụ điện của mạch là 4P. Khi rôto máy phát quay với tốc độ 2 n (vòng/phút) thì công suất tiêu thụ điện của mạch là
A. 8 P 3
B. 1,414P.
C. 4P.
D. 2P.
41. Trong cách mắc dòng điện xoay chiều ba pha đối xứng theo hình tam giác, phát biểu nào sau đây là không đúng?
A. Dòng điện trong mỗi pha bằng dòng điện trong mỗi dây pha.
B. Hiệu điện thế giữa hai đầu một pha bằng hiệu điện thế giữa hai dây pha.
C. Công suất tiêu thụ trên mỗi pha đều bằng nhau.
D. Công suất của ba pha bằng ba lần công suất mỗi pha.
42. Khi truyền tải điện năng của dòng điện xoay chiều ba pha đi xa ta phải dùng ít nhất là bao nhiêu dây dẫn?
A. Hai dây dẫn. B. Ba dây dẫn. C. Bốn dây dẫn. D. Sáu dây dẫn.
43. Một động cơ không đồng bộ ba pha hoạt động bình thường khi hiệu điện thế hiệu dụng giữa hai đầu mỗi cuộn dây là 220V. Trong khi đó chỉ có một mạng điện xoay chiều ba pha do một máy phát ba pha tạo ra, suất điện động hiệu dụng ở mỗi pha là 127V. Để động cơ hoạt động bình thường thì ta phải mắc theo cách nào sau đây?
A. Ba cuộn dây của máy phát theo hình tam giác, ba cuộn dây của động cơ theo hình sao.
B. Ba cuộn dây của máy phát theo hình tam giác, ba cuộn dây của động cơ theo tam giác.
C. Ba cuộn dây của máy phát theo hình sao, ba cuộn dây của động cơ theo hình sao.
D. Ba cuộn dây của máy phát theo hình sao, ba cuộn dây của động cơ theo hình tam giác.
44. Chọn câu Đúng.
A. Chỉ có dòng điện ba pha mới tạo ra từ trường quay.
B. Rôto của động cơ không đồng bộ ba pha quay với tốc độ góc của từ trường.
C. Từ trường quay luôn thay đổi cả hướng và trị số.
D. Tốc độ góc của động cơ không đồng bộ phụ thuộc vào tốc độ quay của từ trường và momen cản.
45.Phát biểu nào sau đây về động cơ không đồng bộ ba pha là sai?
A. Hai bộ phận chính của động cơ là rôto và stato. B. Bộ phận tạo ra từ trường quay là státo.
C. Nguyên tắc hoạt động của động cơ là dựa trên hiện tượng điện từ.
D. Có thể chế tạo động cơ không đồng bộ ba pha với công suất lớn.
46. Ưu điểm của động cơ không đồng bộ ba pha so va động cơ điện một chiều là gì?
A. Có tốc độ quay không phụ thuộc vào tải.
B. Có hiệu suất cao hơn.
C. Có chiều quay không phụ thuộc vào tần số dòng điện.
D. Có khả năng biến điện năng thành cơ năng.
47. Một động cơ không đồng bộ ba pha hoạt động bình thường khi hiệu điện thế hiệu dụng giữa hai đầu mỗi cuộn dây là 100V. Trong khi đó chỉ có một mạng điện xoay chiều ba pha do một máy phát ba pha tạo ra, suất điện động hiệu dụng ở mỗi pha là 173V. Để động cơ hoạt động bình thường thì ta phải mắc theo cách nào sau đây?
A. Ba cuộn dây của máy phát theo hình tam giác, ba cuộn dây của động cơ theo hình sao.
B. Ba cuộn dây của máy phát theo hình tam giác, ba cuộn dây của động cơ theo tam giác.
C. Ba cuộn dây của máy phát theo hình sao, ba cuộn dây của động cơ theo hình sao.
D. Ba cuộn dây của máy phát theo hình sao, ba cuộn dây của động cơ theo hình tam giác.
48. Phát biểu nào sau đây là đúng? Người ta có thể tạo ra từ trường quay bằng cách cho
A. nam châm vĩnh cửu hình chữ U quay đều quanh trục đối xứng của nó.
B. dòng điện xoay chiều chạy qua nam châm điện.
C. dòng điện xoay chiều một pha chạy qua ba cuộn dây của stato của động cơ không đồng bộ ba pha.
D. dòng điện một chiều chạy qua nam châm điện.
49. Phát biểu nào sau đây là đúng? Người ta có thể tạo ra từ trường quay bằng cách cho dòng điện:
A. xoay chiều chạy qua nam châm điện. B. một chiều chạy qua nam châm điện.
C. dòng điện xoay chiều một pha chạy qua ba cuộn dây của stato của động cơ không đồng bộ ba pha.
D. dòng điện xoay chiều ba pha chạy qua ba cuộn dây của stato của động cơ không đồng bộ ba pha.
50. Phát biểu nào sau đây là không đúng? Cảm ứng từ do cả ba cuộn dây gây ra tại tâm stato của động cơ không đồng bộ ba pha, khi có dòng điện xoay chiều ba pha đi vào động cơ có:
A. độ lớn không đổi. B. phương không đổi.
C. hướng quay đều. D. tần số quay bằng tần số dòng điện.
40.D
41.A
42.B
43.D
44.D
45.C
46.B
47.A
48.A
49.D
50.B
Máy phát điện xoay chiều một pha thứ nhất có 2p cặp cực từ, roto quay với tốc độ n vòng/phút thì phát sinh ra suất điện động có tần số 60Hz. Máy phát điện xoay chiều một pha thứ hai có p cực từ, roto quay với tốc độ lớn hơn của máy thứ nhất là 525 vòng/phút thì tần số của suất điện động do máy phát ra là 50 Hz. Số cực từ của máy thứ hai bằng
A. 4
B. 16
C. 6
D. 8
Đáp án D
Theo đề ta có:
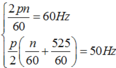
![]() vòng/s
vòng/s
Vậy số cực từ của máy thứ hai là:
 cực từ
cực từ
STUDY TIP
Công thức tính tần số của máy phát điện xoay chiều có p cặp cực từ và roto quay với tốc độ n vòng/s là:
f = p n ( H z )
Lưu ý khi đề không cho chuẩn đơn vị thì chúng ta phải đổi rồi sau đó mới thực hiện tính toán tránh có nhầm lẫn đáng tiếc xảy ra.
Nối hai cực của máy phát điện xoay chiều vào hai đầu đoạn mạch RLC. Bỏ qua điện trở dây nối, coi từ thông cực đại gửi qua các cuộn dây
của máy phát không đổi
Khi máy phát quay với tốc độ n (vòng/phút) thì công suất tiêu thụ điện đạt cực đại là Po
Khi máy phát quay với tốc độ 2n(vòng/phút) thì công suất tiêu thụ điện là Po/2
Khi máy phát quay với tốc độ 3n( vòng/phút) thì công suất tiêu thụ của máy phát là bao nhiêu?
đáp án: P=729*Po/1873
Công suất của mạch ngoài \(P = I^2 R = \frac{E^2}{R^2+(Z_L-Z_C)^2}R\)
Mà suất điện động hiệu dụng \(E = \omega\Phi \)
TH1: \(\omega = \omega_0; P_{max}\)
\(P = I^2 R = \frac{E^2}{R^2+(Z_L-Z_C)^2}R\)
\( = \frac{\omega^2 \Phi ^2}{R^2+(Z_L-Z_C)^2}R \)
\( = \frac{ \Phi ^2}{\frac{R^2}{\omega^2}+\frac{Z_L^2}{\omega^2}-2\frac{Z_LZ_C}{\omega^2}+\frac{Z_C^2}{\omega^2}}R \)
\( = \frac{ \Phi ^2}{\frac{1}{\omega^4C^2}+\frac{R^2-2L/C}{\omega^2}+L^2}R \)
\(P_{max} \Leftrightarrow A = (\frac{1}{\omega^4C^2}+\frac{R^2-2L/C}{\omega^2}+L^2)_{min}\)
đặt \(x = \frac{1}{\omega^2}\)
=> \(A_{min} \Leftrightarrow x = \frac{-b}{2a} = \frac{2L/C-R^2}{2/C^2}.\)
=> \(\frac{2}{C^2\omega_0^2} = \frac{2L}{C}-R^2\) hay \(2Z_C^2 = 2Z_LZ_C - R^2 => R^2 =2Z_LZ_C- 2Z_C^2.(1)\)
Ta có \(\frac{P_1}{P_0} = \frac{I_1^2}{I_0^2} = \frac{E_1^2Z_0^2}{E_0^2Z_1^2} = \frac{\omega_1^2Z_0^2}{\omega_0^2Z_1^2} = \frac{4\omega_0^2Z_0^2}{\omega_0^2Z_1^2} = \frac{1}{2}\)
=> \(Z_1^2 = 8Z_0^2\)
=> \(R^2 +(2Z_L - \frac{Z_C}{2})^2 = 8 (R^2 + (Z_L-Z_C)^2) (2)\)
Thay (1) vào (2) ta được \(4Z_L^2 -\frac{7Z_C^2}{4} = 8(Z_L^2 - Z_C^2)\)
=> \(\frac{25}{4}Z_C^2 = 4Z_L^2\) hay \(Z_L = \frac{5}{4}Z_C .(3)\)
Tiếp theo ta xét tỷ số \(\frac{P_2}{P_0} = \frac{\omega_2^2 Z_0^2}{\omega_0^2Z_2^2} = \frac{9.(R^2+(Z_L-Z_C)^2)}{R^2+(3Z_L-Z_C/3)^2}=\frac{9(Z_L^2 - Z_C^2)}{9Z_L^2 - 17/9Z_C^2} = \frac{9(25/4-1)}{9.25/4 - 17/9} = \frac{81/16}{1753/144} = \frac{729}{1753}.\)
=> \(P_2 = \frac{729}{1753}P_0\)
Đáp án thu được như của bạn rồi nhé.
Mình gõ nhầm đoạn tính ở dòng cuối nhé.
\(\frac{P_2}{P_0} = \frac{9.(25/16 - 1)}{9.25/16 - 17/9} = \frac{729}{1753}.\)
Bạn xem lại kết quả nhé. Mình cũng bầm lại rồi nhưng không thu được kết quả của bạn.:)))))
cho em hỏi là ta có công thức P= \(\frac{U^2}{R}cos^2\varphi\)
Po= U^2 * cos^2(phi1)/R P1= Po/2= 4U^2 * cos^2(phi2)/R
chia 2 cái cho nhau suy ra cos^2(phi2)=8cos^2(phi1)
suy ra cos(phi2) = +- 2căn2cos(phi1)
suy ra 2ZL-ZC/2= 2căn2 (Zc- ZL) giải ra không được kết quả đẹp nhưng bài giải trên.
cô xem giúp em cách này sai ở đâu với ạ
Một máy phát điện xoay chiều một pha nam châm gồm 5 cặp cực, rôto quay với tốc độ góc ω. Nối hai cực của máy phát điện đó với động cơ không đồng bộ một pha thì tốc độ góc của động cơ không thể là
A. 2ω.
B. 6ω.
C. 3ω.
D. 4ω.
Đáp án B
Nếu quay đồng bộ thì khi đó không có sự chuyển động tương đối giữa roto và cảm ứng từ suy ra không có sự biên thiên từ thông qua khung dây của roto ⇒ trong roto không xuất hiện dòng điện cảm ứng ⇒ không có lực từ ⇒ không có momen làm roto quay ⇒ roto phải quay chậm hơn từ trường quay
⇒ tốc độ góc của động cơ không thể là ω
Một máy phát điện xoay chiều một pha nam châm gồm 5 cặp cực, rôto quay với tốc độ góc ω. Nối hai cực của máy phát điện đó với động cơ không đồng bộ một pha thì tốc độ góc của động cơ không thể là
A. 2ω.
B. 6ω.
C. 3ω.
D. 4ω.
Đáp án B
Nếu quay đồng bộ thì khi đó không có sự chuyển động tương đối giữa roto và cảm ứng từ , không có sự biên thiên từ thông qua khung dây của roto, trong roto không xuất hiện dòng điện cảm ứng , không có lực từ , không có momen làm roto quay roto phải quay chậm hơn từ trường quay tốc độ góc của động cơ không thể là 6ω...
Một máy phát điện xoay chiều một pha nam châm gồm 5 cặp cực, rôto quay với tốc độ góc ω. Nối hai cực của máy phát điện đó với động cơ không đồng bộ một pha thì tốc độ góc của động cơ không thể là
A. 2ω.
B. 6ω.
C. 3ω.
D. 4ω.
Máy phát điện xoay chiều một pha thứ nhất có 2p cặp cực từ, roto quay với tốc độ n vòng/phút thì phát ra suất điện động có tần số 60 Hz. Máy phát điện xoay chiều một pha thứ hai có p/2 cặp cực từ, roto quay với tốc độ lớn hơn của máy thứ nhất 525 vòng/phút thì tần số của suất điện động do máy phát ra là 50 Hz. Số cực từ của máy thứ 2 bằng:
A. 8
B. 6
C. 4
D. 16
Đáp án C
Phương pháp: Công thức tính tần số: f = np (n (vòng/s) là tốc độ quay của roto; p là số cặp cực)
Cách giải: Ta có:
=> Số cực từ của máy thứ 2 là: p/2 = 4