Bài 18. Động cơ không đồng bộ ba pha
Nội dung lý thuyết
Các phiên bản khácĐỘNG CƠ KHÔNG ĐỒNG BỘ BA PHA
1. Sự quay không đồng bộ
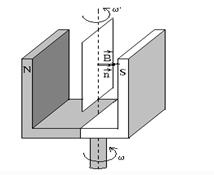
- Từ trường quay: Khi một nam châm hình chữ U (nam châm hình móng ngựa) quay đều quanh trục đối xứng của nó, thì từ trường do nó sinh ra có vectơ cảm ứng từ cũng quay đều quanh trục. Từ trường đó gọi là từ trường quay.
- Khung dây dẫn đặt trong từ trường quay sẽ quay theo từ trường đó với tốc độ góc nhỏ hơn.
- Động cơ hoạt động theo nguyên tắc này gọi là động cơ không đồng bộ
2. Động cơ không đồng bộ ba pha
Động cơ không đồng bộ ba pha là một máy điện dùng để biến đổi điện năng thành cơ năng, hoạt động dựa trên hiện tượng cảm ứng điện từ và sử dụng từ trường quay

Cấu tạo máy gồm 2 bộ phận chính:
- Stato: Giống như stato của máy phát điện xoay chiều ba pha, gồm ba cuộn dây giống hệt nhau, đặt lệch 1200 trên khung tròn.
- Rôto: Là khung dây dẫn có thể quay dưới tác dụng của từ trường quay. Để tăng hiệu quả người ta ghép nhiều khung dây dẫn giống nhau có trục quay chung tạo thành một cái lồng hình trụ, mặt bên tạo bởi nhiều thanh kim loại song song bộ phận này gọi là rôto lồng sóc.
Hoạt động:
- Để tạo ra từ trường quay thì ta quay nam châm hình chữ U quanh trục của nó, tuy nhiên, có một cách khác để tạo ra từ trường quay đó là đặt vào 3 cuộn dây của Stato ở trên dòng điện xoay chiều 3 pha, khi đó trong khung dây sẽ sinh ra từ trường quay.
- Rôto lồng sóc nằm trong từ trường quay sẽ quay quanh trục của nó theo sự quay không đồng bộ.
3. Hiệu suất động cơ
Bây giờ, chúng ta xét một động cơ điện được mắc vào mạch như hình vẽ
- Công suất tiêu thụ điện của động cơ: \(P=U.I.\cos\varphi\)
- Công suất tỏa nhiệt (hao phí) trên động cơ: \(P_{hp}=I^2R\)
- Công cơ học do động cơ sinh ra (có ích) là: \(P_i\)
- Khi đó, động cơ tiêu thụ điện năng có công suất \(P\), sinh ra \(P_{hp}\) và \(P_i\)
\(\boxed{P=P_{hp}+P_i}\)
- Hiệu suất động cơ
\(\boxed{H=\dfrac{P_i}{P}}\)